深度图展平方法研究
将 0-65535 数值范围的深度图,通过 “展平” 的方式,处理为 0-255,降低数值范围的同时凸现目标缺陷。展平的核心思路是构建目标平台的 “标准 3D 图”,通过 “实际 3D 图 - 标准 3D 图” 得到凸现缺陷的 “差图”,然后将差图拉升到 0-255,实现展平
利用标准深度图求差分图
该方法能求差分图的前提是两张图片对齐,如果不对齐,求出的差分图无法凸现缺陷。所以第一步尝试将标准深度图与任意缺陷图片对齐,对齐思路是:
由于图片是 2D+3D 一组图片,所以使用以下方法在 2D 图片对齐,然后在 3D 图片求差分图
- 使用 2D 特征查找算子 SIFT 找到两张图片关键点
- 使用 BFMatcher 匹配关键点
- 过滤选择评分高的匹配点,选择其中 3 个点计算两张图转换的放射变换矩阵
- 利用放射变换矩阵变换对应 3D 图
- 求差分图
以下是通过 1-3 过程,选取前 100 配对的匹配点,可以看出大部分匹配点连线是平行的,说明另一个图可以通过平移实现 和另一个图对齐,但是如果选择的是不平行匹配点对,就无法实现对齐
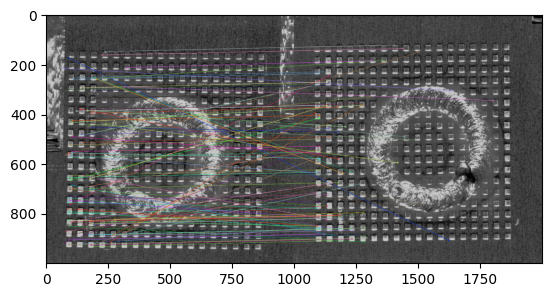
总的来说,以上方法做全图的对齐很难,并且标准图不适合用于位置变动的图像上,即使实现了全图对齐,缺陷所在的圈不对齐,求得的差分图也无法突出这个圈上缺陷。
如果先分割出圈,然后对齐在求差分图呢?这样局限性也很多,数据变少,对齐不好做,如果圈大小不同,问题就更多,因此这个方法局限很大
基于线拟合求标准平面
假设面对的 3D 图片有一个基座平台,通过抽取垂直或者横向的每一条数据线,然后使用一次或者 2 次函数拟合,所有的拟合线组成拟合面,也就是标准平面
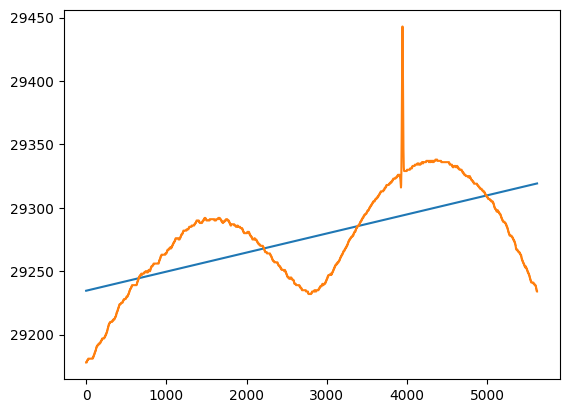
如上图所示,假设曲线是 3D 图某个方向的一条曲线,通过一次函数拟合后得到蓝线,在所有位置求篮线得到标准平面,原始图片减去标准平面得到差分平面,通过这个方法得到以下差分平面
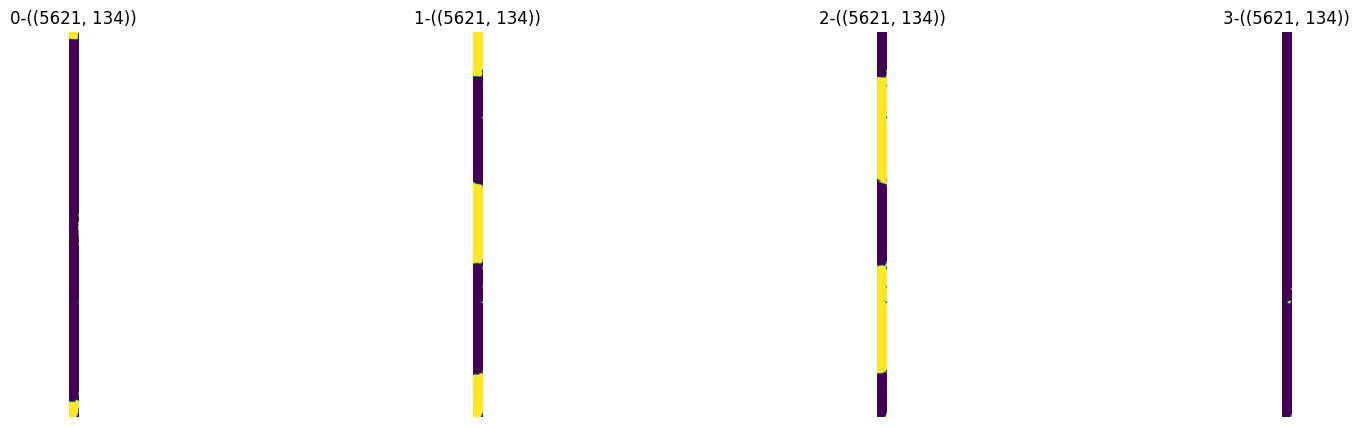
由图可知,在平台不是 “方向刚性” 的情况下,另一个方向的起伏就导致该方法失败,假设使用二次拟合呢?比如下图通过橙色线拟合蓝线
![[Pasted image 20250201100328.png]]
也过还是和一次拟合类似,无法避免
通过平面拟合求标准图片
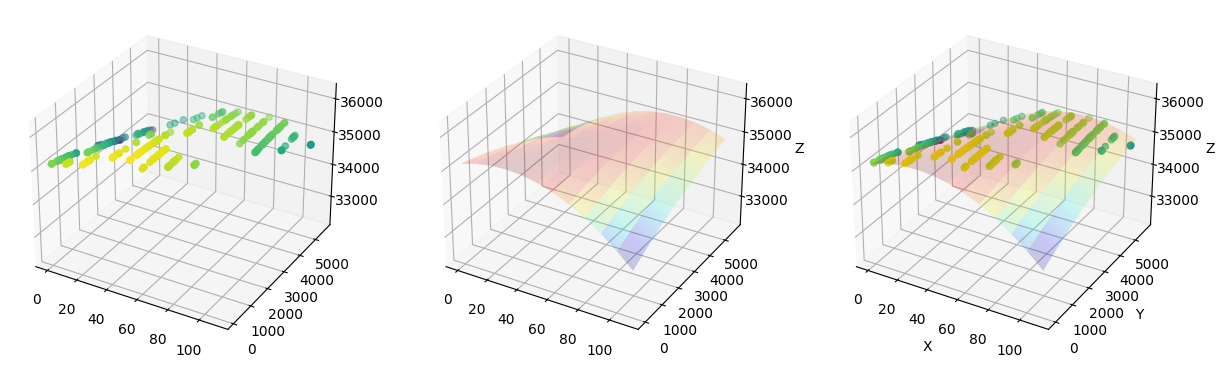
线拟合知识考虑一个方向,存在缺陷性,本方法通过在局部考虑多个方向实现求标准图,比如通过选择少数的点,做曲面拟合,曲面拟合的面就是标准图片,下图分别是采样点、拟合面、采样点 + 拟合面
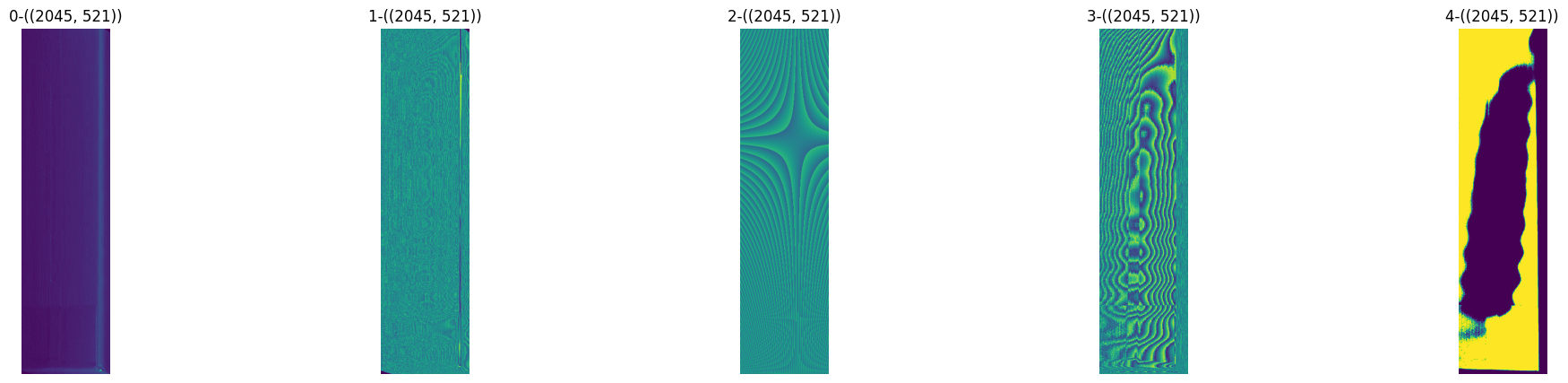
这个方法依赖于采样点,并且如果出现落差很大的区域时,会影响周围区域,无法平稳过渡,下图分别是图片、原始深度、拟合平面、差分图及差分图二值化,可以看出二值化后没有凸现缺陷
通过滤波求标准图片
除通过曲面拟合考虑多个方向的起伏外,还可以通过大卷积核的高斯滤波过滤图片,并将其作为原图的拟合平面,原图 - 拟合平面 = 差分图
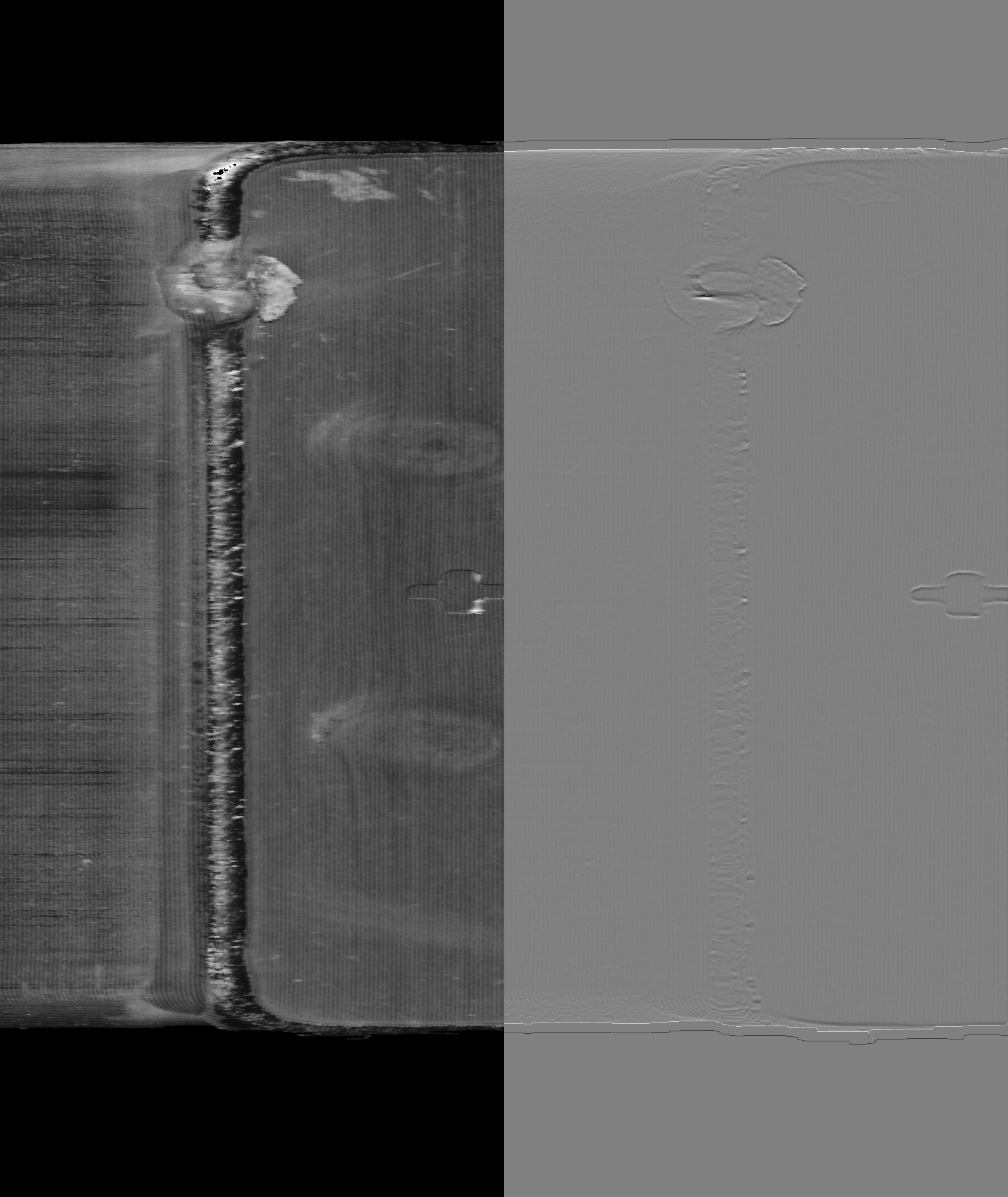
看得出来,比之前效果好多了
通过局部直方图均衡化求标准图
进一步的,高斯核需要针对不同图片手动调整,稳定性较差,我们通过局部直方图均衡化替代这个过程
1 | def gen_flattening_image(tif,grid_w=30,grid_h=30,threshold=40): |
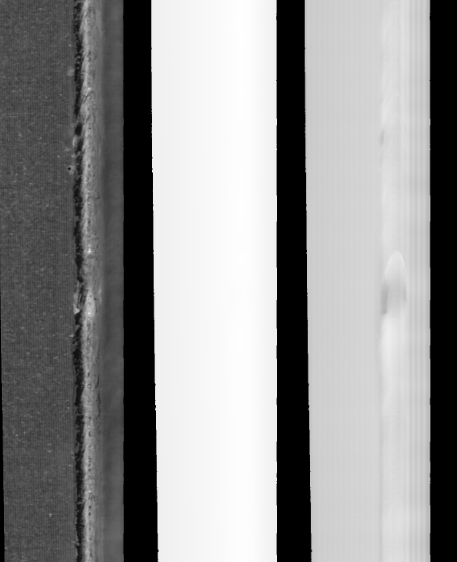
下图分别是原图、直接拉伸截图和采样局部直方图均衡化后的结果,可以看出本方法效果更好
将最后一个方法使用 nuitka 打包为工具,可以快速处理批量图片