GoogleNetv3:Rethinking the Inception Architecture for Computer Vision
在 GoogleNetv2 的基础上,引入分解卷积修改 inception block,实现模型性能提升
什么是 GoogleNetv3?
![]()
- GoogleNetv2 基础上改进,主要是引分解卷积实现计算量的下降
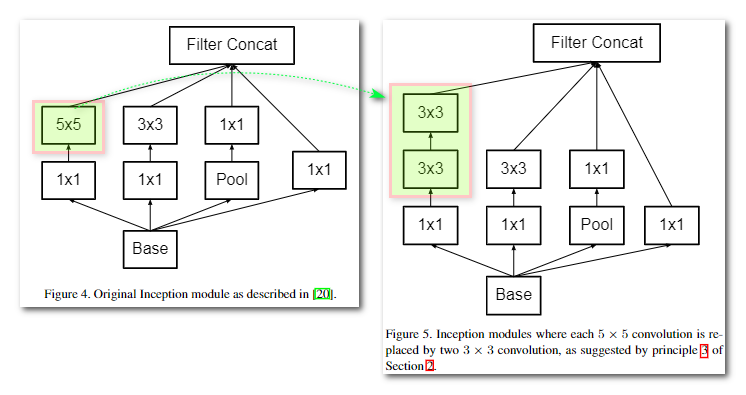
GoogleNetv3 的网络结构?
![]()
- 通过分解卷积,修改 inception block,然后堆叠该模块得到 GoogleNetv3
GoogleNetv3 的卷积核分解方式?
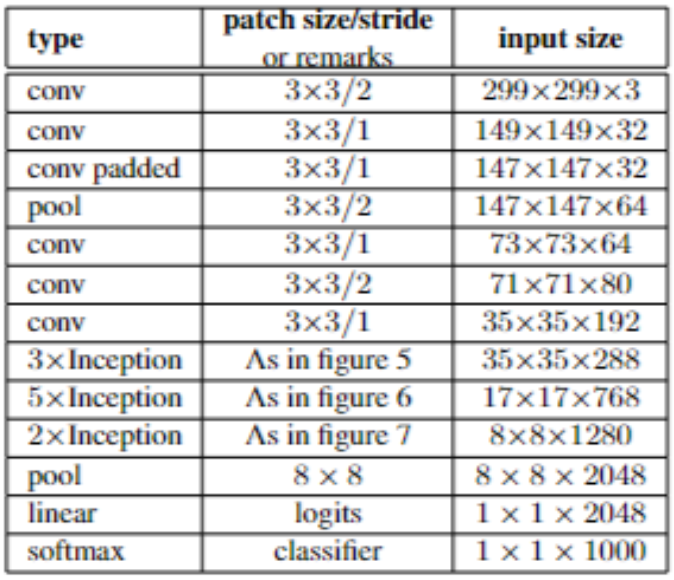
- 大卷积⇒多个小卷积: 类似 Googlev2 的 Inceptionv2 block,将大卷积核分解为多个小卷积核
![]()
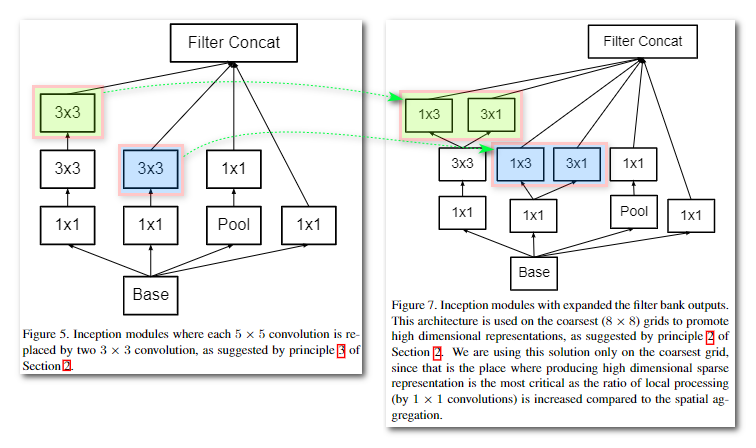
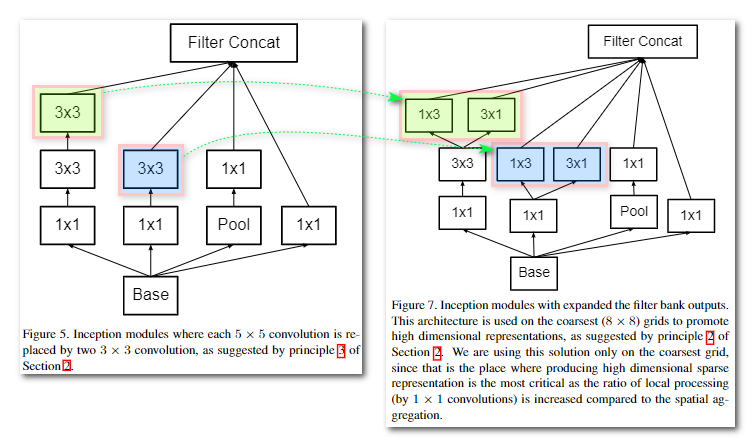
- 大卷积⇒多个不对称卷积: 将大卷积核分解为非对称卷积核,空间可分离卷积 (Spatial Separable Convolutions)
![]()
GoogleNetv3 的损失函数?
- 论文有使用辅助分类器,没说辅助分类器如何贡献损失,GoogleNetv1 中 2 个辅助分类器损失的 0.3 贡献到总的损失中,一般分类损失使交叉熵损失 (CrossEntropyLoss)
GoogleNetv3 中,关于辅助分类器的作用?
- GoogleNetv1 的训练辅助分类器 最初设计的目的是为了是梯度能往更深层进行传递,改善收敛速度
- GoogleNetv3 发现辅助分类器在训练初期并没有导致收敛性的提高,但是在训练接近尾声时,有辅助分类器的网络开始超越没有任何分支的网络的准确率,达到了更高的稳定性水平
- GoogleNetv3 认为辅助分类词起到了正则化 (regularization) 的作用。如果侧分支是批量规格化的或者具有丢失层,则网络的主分类器执行得更好,这一事实支持了这一点