扩散模型包括两个过程,加躁过程通过定义参数计算,不包括学习参数,去躁过程使用 Unet 计算噪声,通过计算加躁前和去躁后的损失,驱动网络训练。无论加躁去躁都是在通过数学证明得到其分布,然后通过 “重参数化” 技术实现采样
(图片)-> 噪声 -> 随机图片,随机图片
什么是 DDPM ?
![]()
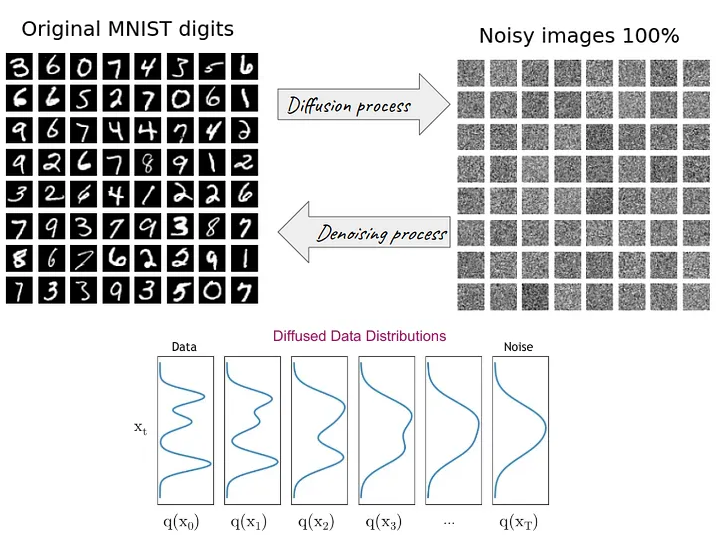
- DDPM 模型主要分为两个过程:forward 加噪过程(从右往左)和 reverse 去噪过程(从左往右)
- 加噪过程(Diffusion process):指向数据集的真实图片中逐步加入高斯噪声,由图片可知,加噪后的数据分布越来越接近高斯分布,也就是变为纯噪声图片
- 去噪过程(Denoise Process):指对加了噪声的图片逐步去噪,从而还原出真实图片
- 加噪过程满足一定的数学规律,而去噪过程则采用神经网络来学习
DDPM 的加躁过程(Diffusion process)?
![]()
- 受到热力学中分子扩散的启发:分子从高浓度区域扩散至低浓度区域,直至整个系统处于平衡,加噪过程也是同理,每次往图片上增加一些噪声,直至图片变为一个纯噪声为止
- 1)逐步加躁过程:给定初始数据分布 x0∼q(x) ,然后定义一个扩散过程:逐渐向数据分布添加高斯噪声,共计加噪声 T 次,产生一系列带噪声图片 x1,x2,...,xT 。在由 xt−1 到 xt 的过程中,噪声是的标准差 / 方差是以一个在区间 (0,1) 内的固定值 βT 确定的,均值是以当前固定值 βT 和当前时刻的图片数据 xt−1 确定。
- 2)加躁结果:随着 t 的不断增大,原始数据逐步失去他的特征,当 T∼inf,xT 趋近于一个各向独立的高斯分布。从视觉上来看,就是将原本一张完好的照片加噪很多步后,图片几乎变成了一张完全是噪声的图片,所谓完全噪声,目标与目标、图片与图片的边界都混在一起,无法区分边界
![]()
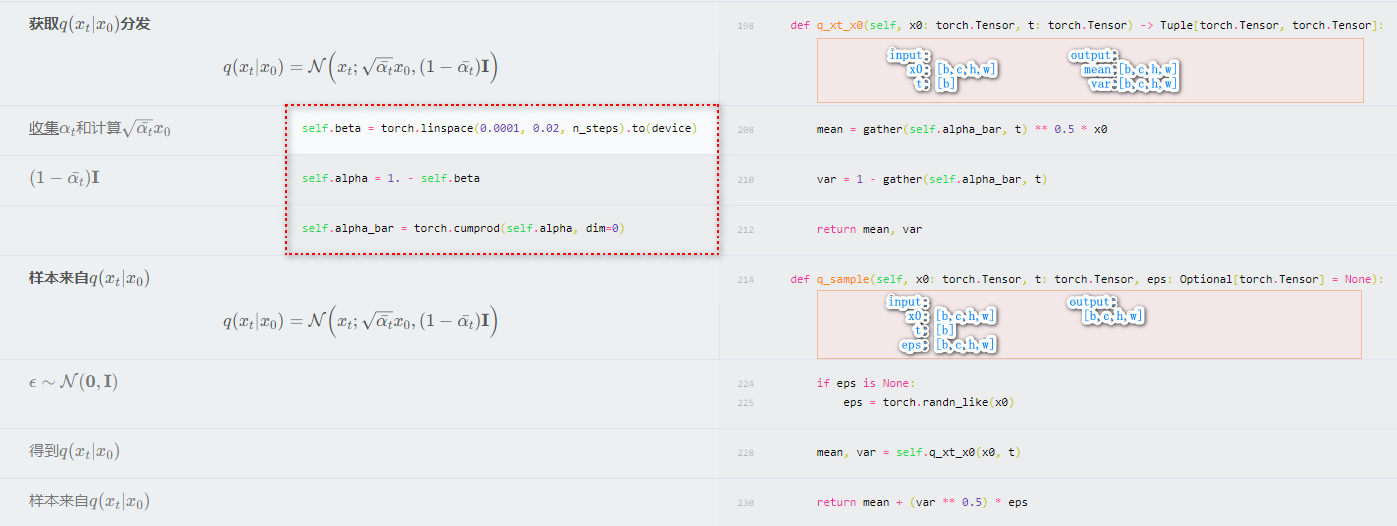
- 3)任意 t 时刻的加躁结果:在逐步加噪的过程中,我们其实并不需要一步一步地从 x0,x1,... 去迭代到 xt。事实上,我们可以直接从 x0 和固定序列 {βT∈(0,1)}t=1T 直接计算得到。定义 αt=1−βt,αt=∏i=1Tαi,那么得到以下公式,其中 zt−1,zt−2,⋯∼N(0,I),zt−2 是合并两个高斯分布。
xtq(xt∣x0)=αtxt−1+1−αtzt−1=αtαt−1xt−2+1−αtαt−1zt−2=⋯=αˉtx0+1−αˉtz=N(xt;αˉtx0,(1−αˉt)I)
- 4) βt 的设置:一般地,我们随着 t 的增大,数据越接近随机的高斯分布,βt 的取值越来越大,所以 β1<β2<…<βT,所以 α1>α2>…>αT
DDPM 加躁时,如何推出 P(xt∣xt−1) 的分布?
- q(xt∣xt−1) 是 xt 在 x=xt−1 下的条件概率分布,已知 x∼q(x),I∼N(0,1),βT 是一个常数,如何推出 P(xt∣xt−1)∼N(xt;1−βtxt−1,βtI)?
- 1)在 DDPM(Denoising Diffusion Probabilistic Models)中,我们有一个马尔科夫链,其中每个状态 xt 都是前一个状态 xt-1 和高斯噪声的结果。这个过程可以写成以下公式,其中 εt 是从标准正态分布 N (0, 1) 采样的噪声,βt 是一个小的时间步
xt=1−βtxt−1+βtεt
- 2)想要找到条件概率 p(xt∣xt−1),这是 xt 给定 xt−1 的概率。由于 xt 是 xt−1 和高斯噪声的线性组合,我们可以直接计算这个条件概率。首先,注意到 xt−1−βtxt−1 是高斯噪声 βtεt,所以它服从 N(0,βt)。因此,我们有,对于第二行公式来说,因为 xt−1 是已知,可以认定是一个常量:
xt−1−βtxt−1=N(xt;0,βt)xt=N(xt;0,βt)+1−βtxt−1p(xt∣xt−1)=N(xt;1−βtxt−1,βt)
- 因为任何正态分布的线性变换仍然是正态分布。在这个例子中,线性变换是由 xt−1 和高斯噪声的线性组合形成的
DDPM 加躁过程如何合并不同时刻的噪声?
- 在求解从 x0 推导 xn 的过程中,涉及以下递归公式,不同时刻的噪声 zt 如何合并为最终的噪声 z
xt=αtxt−1+1−αtzt=αt(αt−1xt−2+1−αt−1zt−1)+1−αtzt=αtαt−1xt−2+(αt(1−αt−1)zt−1+1−αtzt)=αtαt−1xt−2+αt(1−αt−1)+(1−αt)zˉt=αtαt−1xt−2+1−αtαt−1zˉt=αtαt−1⋯α2α1x0+1−αtαt−1⋯α2α1z=αˉtx0+1−αˉtz
- 在由 xt−2 计算 xt 时,其分解公式
xt=αtαt−1xt−2+αt−αtαt−1zt−2+1−αtzt−1
,其中 zt−2,zt−1∼N(0,1),所以 αt−αtαt−1zt−2+1−αtzt−1 分别服从 N(0,αt−αtαt−1),N(0,1−αt),根据两个正态分布相加、相减、相乘后的分布情况,αt−αtαt−1zt−2+1−αtzt−1 还是服从高斯分布,并且服从 N(0,1−αtαt−1)
- 递归下去,所有时刻的 z 相加,服从 N(0,1−α)
DDPM 的去躁过程(Denoise Process)?
![]()
- 1)逆扩散过程近似 pθ:从一个随机的高斯分布 N(0,1) 中重建出一个真实的原始样本,也就是从一个完全杂乱无章的噪声图片中得到一张真实图片。但是,由于需要从完整数据集中找到数据分布,我们没办法很简单地预测 q(xt−1∣xt),因此我们需要学习一个模型 pθ 来近似模拟这个条件概率,从而运行逆扩散过
pθ(x0:T)pθ(xt−1∣xt)=p(xT)t=1∏Tpθ(xt−1∣xt)=N(xt−1;μθ(xt,t),θ∑(xt,t))
- 2)后验扩散条件概率 q(xt−1∣xt,x0):在逆扩散过程中,如果我们给定了 xt 和 x0 , 那我们是可以计算出 xt−1 的,即后验扩散条件概率 q(xt−1∣xt,x0) 是可以计算的,计算得 q(xt−1∣xt,x0)=N(xt−1;μ~(xt,x0),β~tI),根据贝叶斯公式得最终解
q(xt−1∣xt)∼N(xt−1;μt(xt),σt2)=N(xt−1;αt1(xt−1−αˉt1−αtϵ),1−αˉt(1−αˉt−1)(1−αt)z)
- 后向去躁可以看成是一个 MCMC 采样过程,而其中实际每一步的转移方程都是沿着往数据分布的梯度方向迈进,且该方向由我们神经网络的输出来拟合
DDPM 去躁时为什么要向 Unet 输入 t?
- 在 Denoise Process 当中,用 Xt 去预测 Xt−1 的图片,直接预测 Xt−1 比较麻烦,因为 Xt−1 的分布未知,但是加躁是从标准高斯分布采样的,这是明确的,所以最终使用 Unet 预测噪声即可
- 在预测噪声时,向 Unet 输入的是 Xt,t 共 2 个值,其中 t 表示 Denoise Process 到第几步,这和 transformer 中的位置编码一样,这正余弦编码或者是一个傅里叶特征
- 另外,在逐步恢复 Xt−1 的过程中,U-net 是参数共享的,加入 time embedding 能够根据不同的输入而生成不同的输出
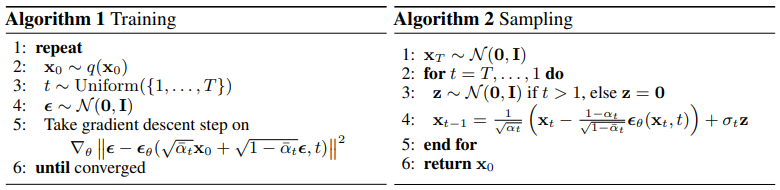
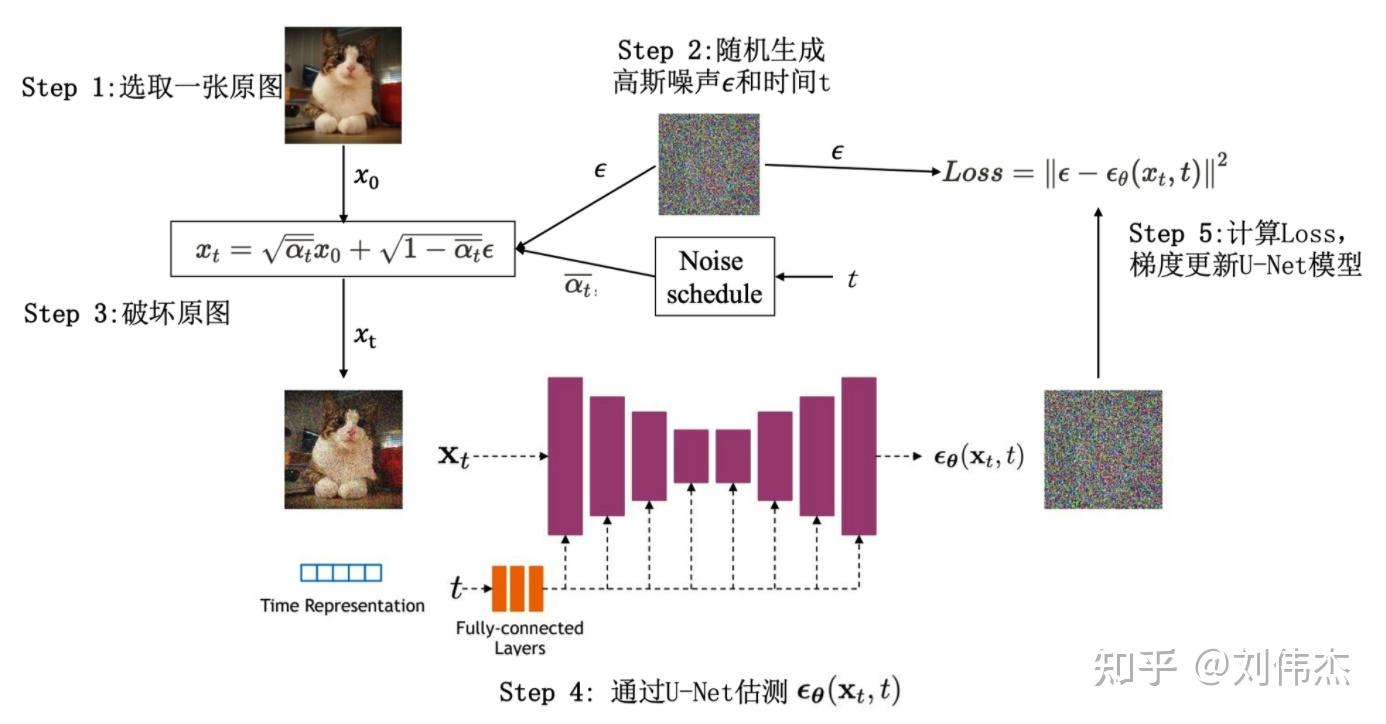
DDPM 的训练?
![]()
- 1)从训练数据中,抽样出一张图片 x0∼q(x)
- 2)随机抽样出一个 timestep,即 t∼Uniform(1,...,T)
- 3)随机抽样出一个噪声,即 ϵ∼N(0,I)
- 4)计算 loss:ϵ−ϵθ(αˉtx0+1−αˉtϵ,t),其中 ϵθ 表示 UNet 架构的去噪模型
- 5)计算梯度,更新模型
- 6)重复上面过程,直至收敛
![]()
DDPM 的推理?
![]()
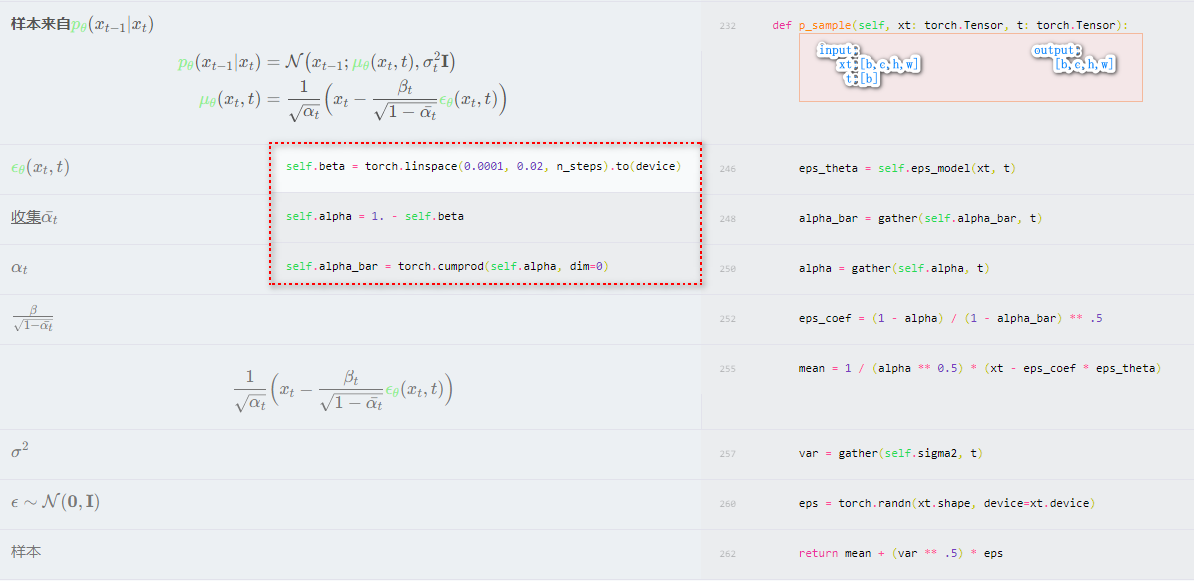
- 1)从标准高斯分布采样数据 xT∼N(0,1)
- 从 T 遍历到到 1,共遍历 T 次以下操作
- 3)从标准高斯分布采样数据 z∼N(0,1)
- 4)按照公式还原 xT−1,这个公式是根据严谨的数学流程推导出来的,其中 σt2=1−αˉt(1−αt)(1−αˉt−1),在 DDPM 论文中,已通过实验证明可用 σt2=βt 替
xt−1=αt1(xt−1−αˉt1−αtϵθ(xt,t))+σtz
- 5)遍历 T 次后,输出 x0,完成图片还原
![]()
DDPM 的损失函数?
- 和 VAE 相似,DDPM 也是最小化负对数似然函数的下确界
logpθ(x0)=log∫pθ(x0:T)dx1:T=log∫q(x1:T∣x0)pθ(x0:T)q(x1:T∣x0)dx1:T≥Eq(x1:T∣x0)[logq(x1:T∣x0)pθ(x0:T)]
进一步得
L=−VLB=Eq(x1:T∣x0)[logpθ(x0:T)q(x1:T∣x0)]=LTDKL(q(xT∣x0)∥pθ(xT))+∑t=2TLtDKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))L0−Eq(x1∣x0)[logpθ(x0∣x1)]
第一项约束最终第 T 步得到的加噪结果 xT 接近完成高斯噪声,最后一项约束模型生成的结果与真值接近,而中间的 t-1 项约束逆向过程的马尔科夫链中,神经网络估计出的每一个条件分布接近于对应的真实的数据分布,中间项计算
DKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))=DKL(N(xt−1;μt(xt,x0),σt2)∥N(xt−1;μθ(xt,t),σt2))=21(n+σt21∥μt(xt,x0)−μθ(xt,t)∥2−n+log1)=2σt21∥μt(xt,x0)−μθ(xt,t)∥2
- 其实就是使用网络预测随机噪声,然后和真实添加的噪声计算 MSE 损失,并更新网络
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| def p_losses(denoise_model, x_start, t, noise=None, loss_type="l1"):
if noise is None:
noise = torch.randn_like(x_start)
x_noisy = q_sample(x_start=x_start, t=t, noise=noise)
predicted_noise = unet_model(x_noisy, t)
if loss_type == 'l1':
loss = F.l1_loss(noise, predicted_noise)
elif loss_type == 'l2':
loss = F.mse_loss(noise, predicted_noise)
elif loss_type == "huber":
loss = F.smooth_l1_loss(noise, predicted_noise)
else:
raise NotImplementedError()
return loss
|
GAN、VAE、DDPM 的区别?
- 就学习原始数据分布来说,GAN 通过神经网络直接拟合数据分布;VAE 不直接学习数据分布,而是学习数据的确定性的潜在分布,通过对确定性的潜在分布去接近数据分布;DDPM 则将通过不断将确定性分布和数据分布采样相加,直到达到一个已知的简单分布(如高斯分布),然后反向从已知分布逐步采样去掉确定性分布,最终得到接近原始数据分布
- 就网络学习方式而言:GAN 由生成器和判别器对抗训练得到;VAE 将学习过程分为编码和解码阶段,在编码阶段学习确定性潜在分布,解码阶段从潜在分布重构样本,这个网络需要监督潜在分布和重构质量;DDPM 由确定性的加躁过程和神经网络参与的去躁过程组成,网络用于估计每一次加躁的噪声
- 就生成样本的方式而言:不考虑条件因素,GAN 直接基于随机变量生成样本;VAE 利用解码器从潜在分布生成样本;DDPM 基于随机变量,然后使用神经网络去噪 t 次生成样本
- 这 3 种模型都是无监督学习模型,用于样本生成,通常 GAN 生成的效果更好,但是不好训练,也不好控制;VAE 生成图像比较模糊,但是可以通过控制潜在分布进而控制生成效果;DDPM 需要去躁 t 次,生成速度较慢,但是生成效果很好
参考:
- DDPM 解读(一)| 数学基础,扩散与逆扩散过程和训练推理方法 - 知乎
- 全网最简单的扩散模型 DDPM 教程 - 知乎
- DDPM (Denoise Diffusion Probabilistic Model) 理论梳理 (含公式推导,小白) - 知乎
- 深入浅出扩散模型 (Diffusion Model) 系列:基石 DDPM(源码解读篇) - 知乎
- 扩散模型 Diffusion Model 与 DDPM_time embedding-CSDN 博客
- 如何通俗理解扩散模型? - 知乎
- 去噪扩散概率模型 (DDPM)
- A friendly Introduction to Denoising Diffusion Probabilistic Models | by Antony M. Gitau | Medium