STN
STN 通过网络学习变换参数,并使用双线性插值使得网络可训练,以达到可以动态学习图片变换参数的可能,实现对不同图片的变换。可用于需要姿态校正的任务上,如 OCR 文字摆正,生成高质量的单人人体区域,3 D 数据变换
什么是 STN ?
![]()
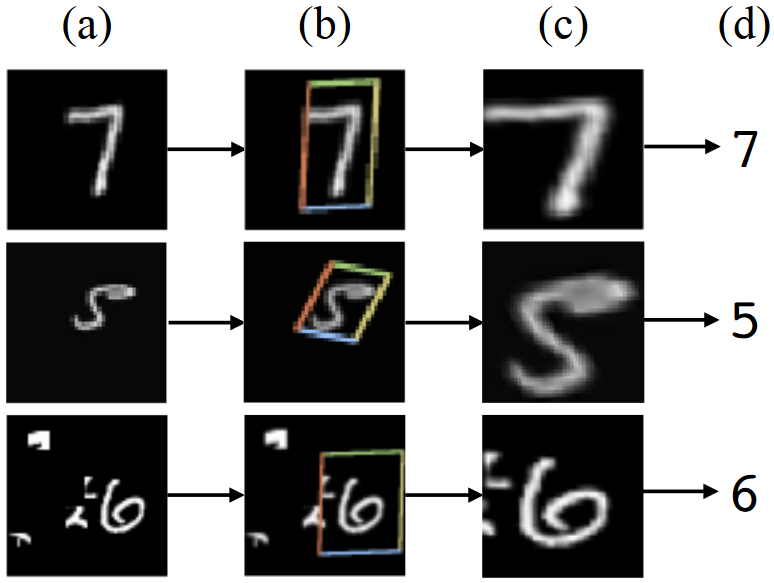
- 在进行计算机视觉任务时,常常希望模型对物体姿势或位置的变化具有一定的不变性,传统方法是使用仿射变换处理图片,但是每张图片的仿射变换参数不一样;深度学习的卷积和池化有一定程度上实现平移不变性,但是比较难实现旋转不变性、缩放不变性
- 能不能通过模型去学习这种 “变换过程” 呢?STN 给出答案,上图 abc 分别是原图、变换矩阵处理区域、处理后的图片。所谓的变换过程,就是学习仿射变换矩阵的 6 或 9 个参数,为了使得这 9 个参数可微,使用双线性插值对变换后的矩阵采样。
STN 的网络结构?
![]()
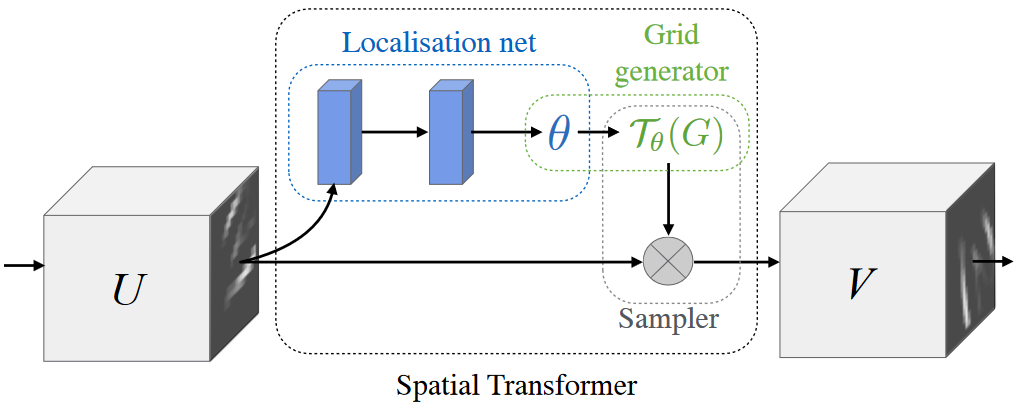
- STN 的网络结构包含以下 3 个部分,其中 U 是图片或特征,V 是经过变换后的输出
- Localisation net:这是一个回归子网络,输出的维度取决于变换规则,如果进行的是仿射变换,则输出 的 6 个实数,如果是投影变换,输出 的 9 个实数。这些实数表示仿射矩阵的值,假设 U=(N, C, H, W),则 Localisation net 输出是矩阵 L (N, 2,3)
- Grid generator:一个根据输出大小设计的一个 grid 生成器,如网络输出分辨率是 (H’, W’),那么 Grid generator 首先生成 (N, 3, H’, W’) 的矩阵 G,其中 3 表示 grid 的位置,如矩阵 G 第 2 位置是 G [N, 3,0,1]=Nx (0,1,0), 矩阵 G 第 5 位置是 G [N, 3,0,4]=Nx (0,4, 0)。得到矩阵 G 的目的是与仿射矩阵 L 相乘,计算 (H’, W’) 的输出对应原始输入 U 的什么位置,即矩阵 GG= =(N, 2, H’, W’)
- Sampler:根据输入 U=(N, C, H, W) 和输出每个 grid 对应原图位置 GG= =(N, 2, H’, W’) 去生成最后的输出。理论上既然 GG 的第二维度表示 U 位置,那么直接取值即可,但是此时的 GG 矩阵第二维度包含小数,不是整数,不能直接取值。借鉴 Mask RCNN 的 ROI Algin 方法,可以由第二维度的取值可以由四周的四个整数求得,最后输出是 V=(N, C, H’, W’)
STN 的损失函数?
- 模型通过对 V 进行监督网络学习,可使用交叉熵
- 模型每次迭代 Grid generator 生成的网格的固定的,和输入无关,因此无需监督
参考: